4DIAC (Рамка за Разпределени Индустриална автоматизация и контрол) е с отворен код и свободно да се разпространява рамка, специално проектиран за разпределени за индустриален контрол и автоматизация. Тя осигурява безплатно IEC 61499-съвместима база, която позволява създаването на разпределени системи за автоматизация и контрол на промишлени среди.
Проектът 4DIAC се състои от четири инструмента, 4DIAC-IDE (IEC 61499 съвместим инженеринг инструмент), Forte (на IEC 61499 по време на изпълнение околната среда), 4DIAC-LIB (на IEC 61499 функционален блок библиотеката) и 4DIAC-Systems (IEC 61499 на примерни проекти).
Тя & rsquo;. SA преносим, конфигурира лесно и оперативно съвместими софтуер, който е проектиран като капка-заместител на множество подобни търговски инструменти, които съществуват в областта на автоматизацията на промишлеността
Задължително например
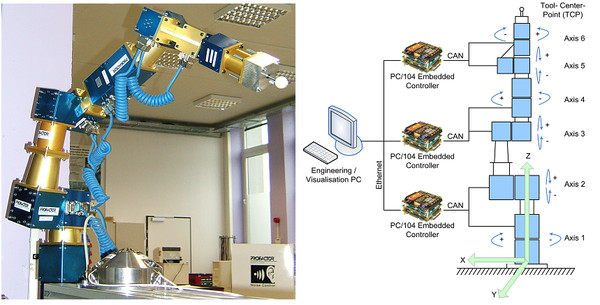
4DIAC може да се използва за контрол на конфигурируем роботизирана система, известен също като модулна 6-DOF робот, който използва мехатронни компоненти и се състои от шест отделни съединения, които са действително PowerCube модули. Някои специални конектори се използват за свързване на този шест модула с всеки.
4DIAC-IDE е отговорен за контролиране на инженеринга на робота & rsquo; ите програма IEC 61499 контрол. В допълнение, моля, имайте предвид, че изпълнението на Robot HMI приложения (RHA) и Robot Control Заявлението (RCA) е роден от хардуерна структура на модулен 6-DOF робота. Повече подробности могат да бъдат намерени на проекта & rsquo; с. Начална страница
Поддържани операционни системи и наличности
4DIAC е софтуер, кръст-платформа написана на Java и C ++ езици за програмиране. Той е проектиран от земята в подкрепа на GNU / Linux, FreeBSD, Mac OS X и Microsoft Windows операционни системи. Молбата е била успешно тествана от двете 64-битови и 32-битови инструкции група архитектури.
Програмата е достъпна за сваляне от Softoware или директно от официалния си уебсайт, тъй като както универсално архив източник и предварително изграден двоичен пакет. FORTE се разпространява и върху Softoware и да го & rsquo; ите на разположение за изтегляне само като универсален пакет-източник
Какво ново в тази версия:.
< р>- Оцветяване на синтаксиса, код завършване и само във времето проверка за грешки в структурирана алгоритъм текстов редактор
- По-добра визуализация на проследявани в момента системи
- По-добър контрол върху процеса на създаване на FORTE обувка-файл
- New например проект, състоящ се от автоматичния контрол на симулирана механична преса
- Длъжностно версия за Mac OS
Какво ново във версия 1.7.2:
- Оцветяване на синтаксиса, код на завършване и просто-in- Време проверка за грешки в структурирана алгоритъм текстов редактор
- По-добра визуализация на проследявани в момента системи
- По-добър контрол върху процеса на създаване на FORTE обувка-файл
- New например проект, състоящ се от автоматичния контрол на симулирана механична преса
- Длъжностно версия за Mac OS
Какво ново във версия 1.7.1:
- Оцветяване на синтаксиса, код на завършване и просто-in- Време проверка за грешки в структурирана алгоритъм текстов редактор
- По-добра визуализация на проследявани в момента системи
- По-добър контрол върху процеса на създаване на FORTE обувка-файл
- New например проект, състоящ се от автоматичния контрол на симулирана механична преса
- Длъжностно версия за Mac OS
Какво ново във версия 1.7.0:
- Оцветяване на синтаксиса, код на завършване и просто-in- Време проверка за грешки в структурирана алгоритъм текстов редактор
- По-добра визуализация на проследявани в момента системи
- По-добър контрол върху процеса на създаване на FORTE обувка-файл
- New например проект, състоящ се от автоматичния контрол на симулирана механична преса
- Длъжностно версия за Mac OS
Какво ново във версия 1.6.2:
- Оцветяване на синтаксиса, код на завършване и просто-in- Време проверка за грешки в структурирана алгоритъм текстов редактор
- По-добра визуализация на проследявани в момента системи
- По-добър контрол върху процеса на създаване на FORTE обувка-файл
- New например проект, състоящ се от автоматичния контрол на симулирана механична преса
- Длъжностно версия за Mac OS
Какво ново във версия 1.5.0 RC2:
- Този кандидат втора освобождаване подобрява оцветяване на синтаксиса в Новият ST редактор, поправя няколко проблема в ЗСК и в редактора за кандидатстване, както и добавя повече тестове и автоматична оценка на изпитването покритие в FORTE.
Какво ново във версия 1.5.0 RC1:
- Основните нови характеристики на този преглед освобождаване са нова примерна система, подобрено управление на наблюдаваните системи, оцветяване на синтаксиса в ST алгоритъм редактори, подобрена създаването зареждане на файлове, както и много поправки, увеличаване на цялостната стабилност.
Какво ново във версия 1.4.2:
- Тази версия добавя набор от поправки към 4DIAC- IDE (6) и FORTE (4).
Какво ново във версия 1.4.1:
- Тази версия предоставя набор от поправки към 4DIAC- IDE (10) и FORTE (2).
Какво ново във версия 1.4:
- Основният принос на тази версия е подобряването на цялостната стабилността и използваемостта на 4DIAC-IDE и FORTE.
- Всичко на всичко, това издание включва поправки и приложения на повече от 84 въпроси.
- Освен това, тя засилва подкрепата за видовете на генерични данни (т.е., ANY_INT, ANY_ELEMENTARY и др.).
- Най-голямата новина обаче е, че рамката 4DIAC сега поддържа всички от IEC 61131-3 функции и функционални блокове като IEC 61499 функционални блокове.
- Разбира се, IEC 61131-3 функции също са на разположение за употреба в структуриран текст алгоритми.
Какво ново във версия 1.3.3:
- A критична грешка памет е намерена в време на работа FORTE , с което предизвика тази трета версия за 1.3 поддръжка предоставяне на пакет от поправки към 4DIAC-IDE (5) и FORTE (2).
Какво ново във версия 1.3.2:
- Това е втората публикация поддръжка на 1.3, предоставяне на пакет от поправки към 4DIAC-IDE (5) и FORTE (2).
Какво ново във версия 1.3.1:
- Това премиерни поддръжка за 4DIAC 1.3 осигурява голяма набор от поправки към 4DIAC-IDE (12) и FORTE (2).
<> силни Изисквания
- Eclipse
- Java 2 Standard Edition Runtime Environment
Коментари не е намерена